

I made a little single-stage 6:1 planetary gearbox for one of the motors.

Cross section, so you can see the bearing arrangement. For compactness and maximum bearing spacing, the planet carrier is supported on either side by bearings, rather than cantilevered as they usually are.

Parting a bunch of 24 tooth planets off some gear rod stock.

To reduce backlash and make everything generally smoother, the planets have ball bearings pressed into them. The inner race of the bearings are pressed onto the planet carrier. Usually the planets ride on pins with bushings, which will contribute to backlash and friction in the gearbox:.

To machine the planet carrier and housing, I had to calibrate the MITERS CNC mill, which hadn't been fully calibrated after its LinuxCNC upgrade. The ballscrew pitch (which we previously didn't know) was figured out by drilling and reaming a set of holes, pressing in dowel pins, and measuring the spacing between the pins. The number of encoder ticks (thus revolutions of the motor) and this distance were used to calculate the pitch, which we then rounded to the closest reasonable number (the measurement was off by ~.04%). With the pitch correct, I then calibrated the backlash in the X/Y axes. Final result machining a 20mm circle was dead on in one axis, and + 9 microns in the other axis. Not too bad.


1/2 a planet carrier:

Front half of the housing:

Back half of the housing. The ring gear was machined from a chunk of BaneBots P80 ring gear. You can make ~8 of these from a $23 section BaneBots ring gear, while a comparable gear from SD-PSI costs ~$50.

Pinon shrink-fit onto the motor shaft:

Output half of the planet carrier installed:


And...I forgot to take a picture of it fully assembled. Oh well. This is a test gearbox, so I probably won't end up using it in a leg, but we'll see. KHK Gears also sampled me some ring gears, planets and pinions to build up a pair of gearboxes. I'll probably end up using those for a actual leg, because they're finer pitch (.5 Mod) and I expect them to be a bit smoother, since 1: I didn't have to part them off larger stock, and 2: they're make by the same manufacturer and designed to used in planetary gear sets.
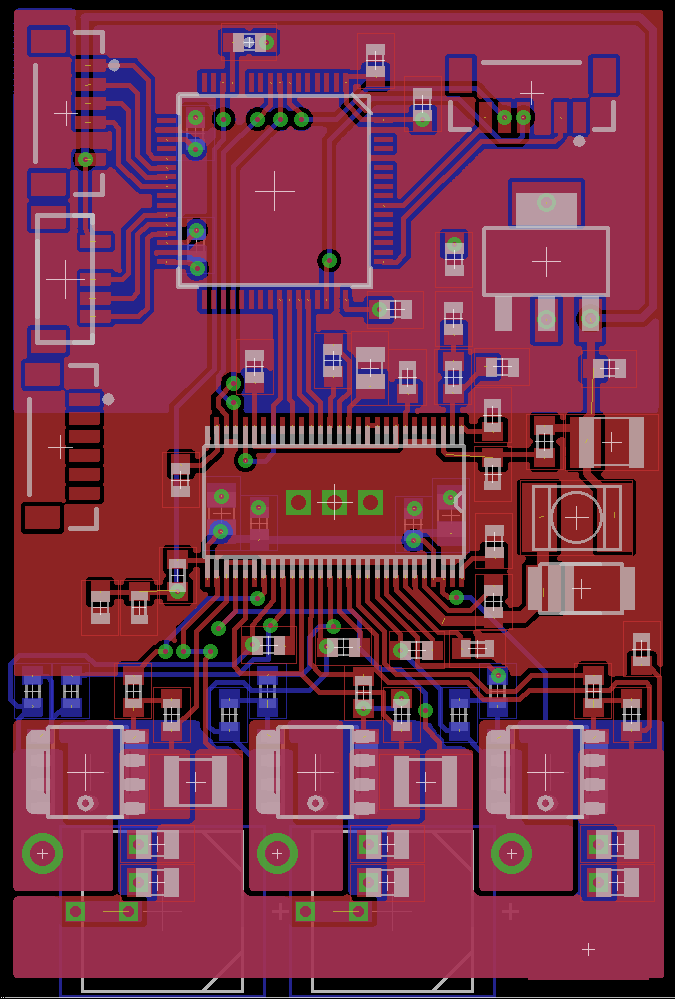
Also, here's a sneak-peak at version 2 of the motor control board. All-in-one this time, not a Nucleo-stack. I still need to finalize position sensor before I finish routing in connectors, but it's really close to being ready to send out. Total size is 35x52mm.
Hm. My math must be off. If that's a 60 tooth 0.8M, then the PCD is 48mm. The 20 tooth should be 16mm each, leaving you another 16 for the sun, so it should be another 20 tooth. But by the photo, and by the ratio math, it's a 12. What have I missed?
ReplyDeleteLove your posts, by the way. How is the mini-lathe running?
Oh, hm, the conversion from mod to dp doesn't work the way I think. Back to Shigleys....
DeleteI should have counted the planet teeth first. I'm reassured :) I also had the 2 * Tp + Ts in mind, which again had to be 20 for the sun if you had 20 for the planets, but works a lot better if it's 2 * 24 + 12. Maybe I'm *not* going to fail Machine Design!
DeleteDid you mod or replace the motor shaft? It looks like you put the pinion on the stator side, which on the 5010's I have (and it looks the same in your other photos), is really short.
ReplyDeleteYeah, that's the unfortunate part about this particular size class of motor. I got some precision 6mm shaft, pressed out the original, and pressed a new one in. It's a really quick modification.
DeleteI just listened to the Robohub podcast about the Cheetah 2 and had a question specifically about its gearbox and yours.
ReplyDeleteWhen talking about transmission transparency and navkdrivabikity, I've never seen a gearbox as transparent as the Barret WAM step-down cable transmission. Would something like that (single stage though) with a steel cable be smoother than a planetary gearbox? As a benefit you could locate the motor away from the leg swing pivot itself. You'd need cables to both sides of the leg (ie:wind and unwind).
Another benefit of this method is you could use cable stretch to measure torque (if you use a small diameter dable) by marking every 10mm for example and measuring the stretch optically.
How are you planning to measure torque on your actuator, via current? You could measure the cogging torque vs. Motor position (absolute angle) and zero the current measurement that way.
Thanks for all the information you're sharing! (BTW still surprised you didn't go with the hobbyking 5208).
About not going with the 5208 gimbal motor: Since I did the original round of testing, the 5010's got $10 cheaper, so they ended up being hands down the best of the bunch.
DeleteI'm not particularly familiar with cable transmissions. While they well may be even smoother than single-stage planetary gearboxes, I highly doubt they can beat the torque density of gears. This doesn't matter much for stationary robot arms, but matters quite a lot for robots that support their own weight.
hi, what torque will you get from this setup?
ReplyDeleteThis comment has been removed by a blog administrator.
ReplyDeleteHi Ben
ReplyDeleteWhere did you get the "Gear Rod Stock" for your planets, struggling to find .8mod (metric) 20 toothed 20PA rod stock or pinion wire anywhere. Did you manufacture this in house?
I want to build a few of these gearboxes and love the way you have used banebots ring gears to cut costs, but cannot find rod stock for the planets or sun gear, any advice pointers to suppliers would be greatly appreciated, the KSM gears are just way to expensive for me to consider, cheap alternatives to the banebots ring/planet & sun gear stock would do if you know of any suppliers?
FYI I am gm82@sussex.ac.uk in the UK and we are just starting out on trying to replicate your Hobbyking Cheetah project starting with the jumping legs.
24 tooth, and I got them from sdp-si
Delete