

Here's a photo-dump of some pictures from assembling the herd of Mini Cheetahs.
150 Stators:

150 Front actuator housings with output bearing installed:

50 upper legs. The upper link was consolidated from 3 parts to 2 for the new robots:

For assembly I got these fancy Wera adjustable torque screwdrivers, so I (and people helping assemble) could repeatably torque all the screws:

A handful of the 450 planet gears with needle bearings installed:

150 rings gears with OD's post-machined to size. Ready to be pressed into the housings:

A sea of sun gears:

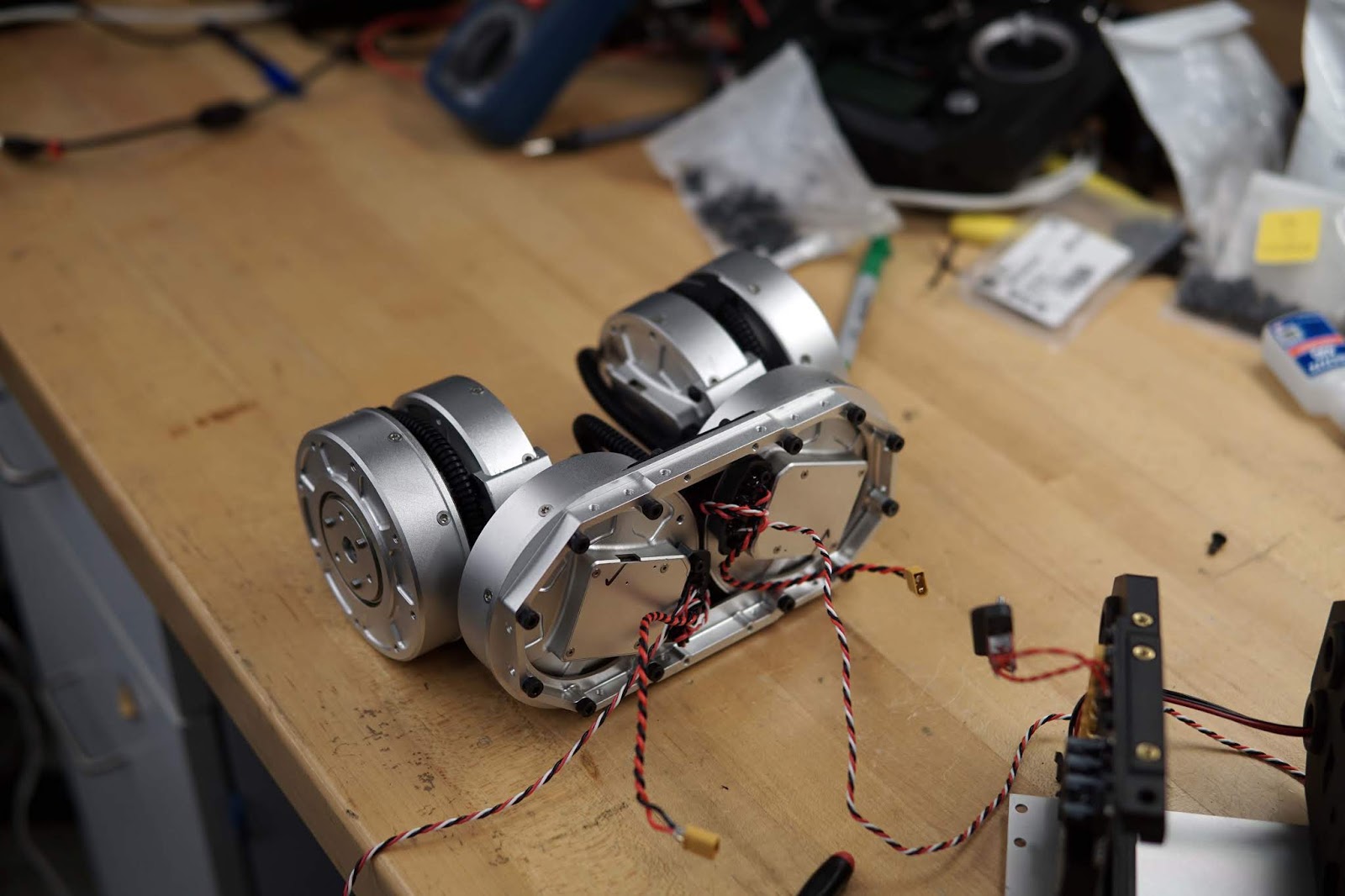
Actuator with stator and gearbox installed:

I made several minor design mistakes I had to fix. Some holes in the sheet metal were 1mm off, so I made this fixture for re-machining the holes. Small mistakes like this sunk a huge amount of time, because each on has to be fixed between 50 and 150 times. Fortunately everything was salvageable.

Most of the actuators with stators and planetary gearboxes installed:

Part of one robot body with computer, CAN interface, IMU, RC receiver, and power supply:

The glorious actuator cabinet:

Computers and CAN breakouts:

Power supplies, body center-plates:

Belts installed, ready for tensioners and outer half of the leg clamshell.

A mostly assembled leg:

A nearly complete robot, waiting for the last few wire-management steps and final body assembly:

One robot during electrical and software testing, before final assembly:

Half a robot's worth of actuators:
Final assembly step of attaching the legs to the body:

Robot with top panel removed:

A pair of robots ready for final testing:

Most of the new robots lined up on the lab treadmill:
