

TL:DR; here's a timelapse of the construction. Jaguar setup and maintained a bunch of cameras, and I compiled the stills into video.
Construction took place over a week, and was done by a combination of East Campus residents, incoming freshmen, a few students from other dorms, and a few random strangers.
I think there are a few key things that made it possible to finish construction in such a short timeframe:
Being prepared
We thought through the construction process as thoroughly as we could before actually building anything. This included putting together lots of documentation and drawings for different parts of the roller coaster, thinking through assembly order and methods, and making jigs to assemble some repetitive parts. Here's an example of one of the sets of assembly documents.
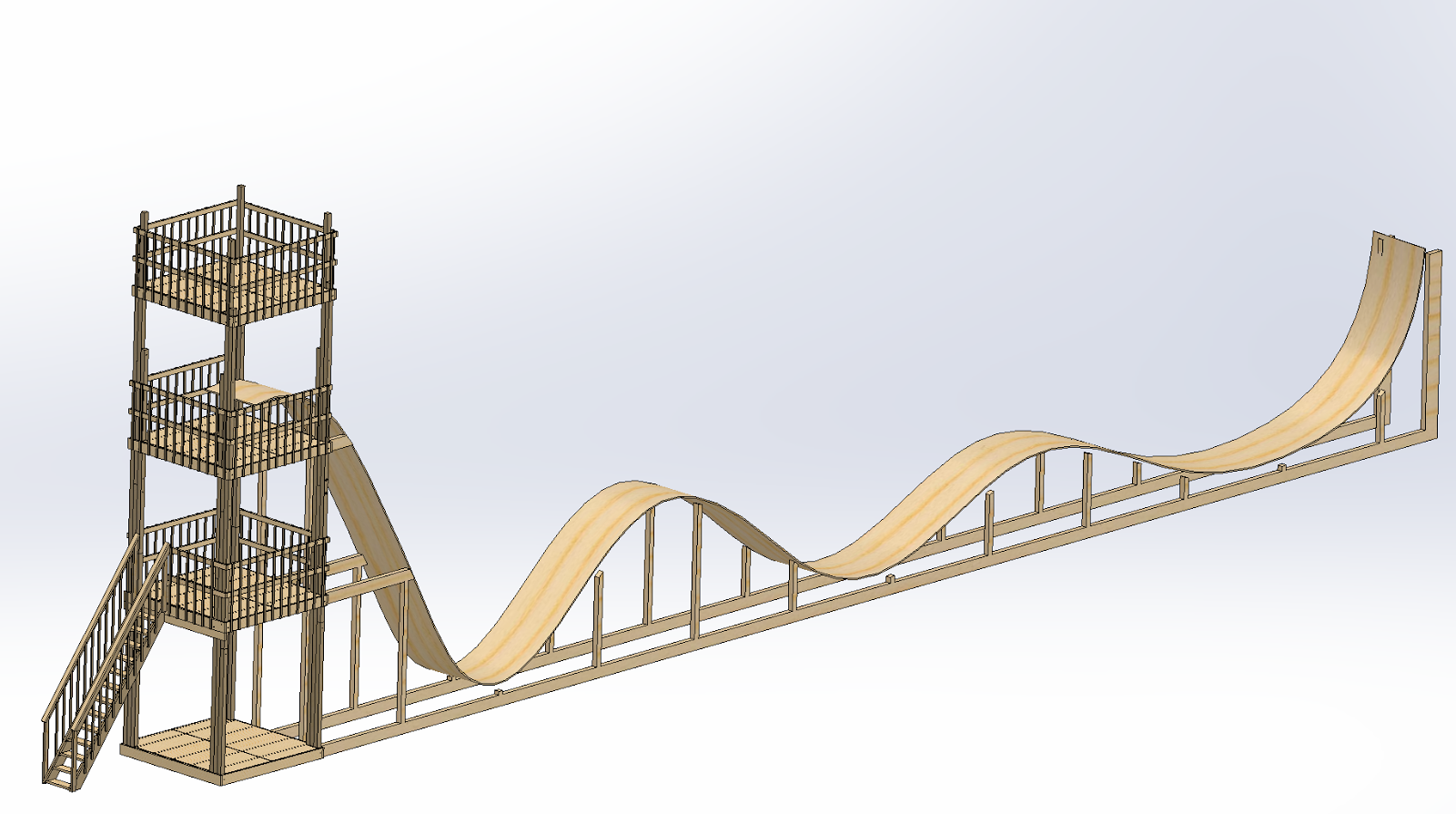
Some parts of the construction, like assembling frames under the track, could be easily parallelized. Each unique frame section got its own drawing showing the critical dimensions and pieces of lumber required. These drawings could then be handed to one or two reasonably skilled people, who were generally able to assemble a frame section in a half hour or so.


The frame directly beneath the track was made from two types of assembly which alternated and fit together kind of like a roller chain (wide link, narrow link, wide link, etc). We built jigs for both the cutting of the 2x6s and 2x4s as well as assembly jigs, since many of each were needed. Then the job was handed off to a crew of enthusiastic freshman who had never really used power tools before.

Not trying to do everything...
Basically delegate, delegate, delegate. I like doing everything, so it's very tempting to try to personally do or oversee everything. Turns out, with a project this big that just isn't possible. Wesley was also great at organizing people to do things. On that note, having more than one person who really knew what was going definitely sped things up.
...But still trying to do as much as possible.
Jobs that were critical to the roller coaster's function and couldn't be easily farmed out Wesley and I did ourselves. Laying the track sub-frame, putting up the tower posts, making sure the frame was actually straight, and more. Sleep was scarce that week.
On to the actual construction.
The night before the first load of Home Depot wood arrived, we marked out the foundation of the roller coaster in cheap yellow rope and tent stakes. The next day, we dug small pits for each of the concrete footers and filled them with gravel. We then leveled all the blocks and started assembling the base platform:

By the first night we had the frame of the platform:

The next day assembly of the frame sections started. They can be seen propped against the trees. Unfortunately, I underestimated the amount of wood we would need over the first weekend, so we used up all our wood early and lost a day.

Sterritt Lumber to the rescue! Truly absurd quantities of wood were delivered on an all-terrain three wheeled swerve drive forklift.

And at this point my documentation fell apart a bit because I forgot to take pictures during the chaos of construction.
The tower posts were assembled to their full 28' length on the ground, bolted together, and then disassembled into halves. The lower half of each posts went up immediately. After the second level platform was built, the top halves of the posts were carried up and bolted on.
Once all the frame sections were built, it only took one day to assemble them to make the structure beneath the track. This was definitely the most impressive day of progress, with basically the entire structure appearing over the course of 8 hours.
 |
| Photo credit to Wesley Lau |
To make sure the frame was assembled straight, each section of the frame was measured to the sidewalk parallel to the coaster. Except for two of the middle sections which interfered with tree roots, we were able to get everything positioned plus or minus about a half inch from the sidewalk over the entire length. The offset in the two middle sections was noted and compensated for when we put of the track sub-frame. To prevent error accumulation along the length of the roller coaster, each frame section was measured and positioned with respect to the base of the tower, rather than with respect to the previous section.
Tall sections of the frame also had work platforms and railings built into them, so we wouldn't have to use ladders when working on or inspecting the track.

Putting up the posts and floors involved lots of miserable augering of 1" and .75" holes through up to 10" of solid wood. Despite Rush's purchase of the biggest, highest torque drills that could be found at Home Depot, the 1" auger bits repeatedly got stuck in the 4x4's. Unsticking them was a half-hour process of violently wrenching the bit back and forth until it came loose. Next year I should build some sort of auger-assist device with a extra gear-down for the drill and a brace so your hand's don't have to deal with the drilling torque.
 |
| Photo credit Danny Ben-David |
Putting up the track sub-frame was one of my favorite parts of construction - watching the roller coaster's track take shape was beautiful. This was a job that had to be done serially, so Wesley and I did the whole thing. To make sure each segment of the track was put up in the correct orientation, I made a drawing including the height of the end corner of each segment with respect to the beam supporting it. We would tack in a segment to the previous one at a corner. The segment could then be rotated to the correct height, and fixed in place with a second screw. Vertical supports were put in for about every other segment. Someone else came in behind us and filled out the supports later. In all, laying the sub-frame was about a day and a half of work.


The track framing finished bright and early in the morning.



The ladder to the second floor was replaced with a nice shallow staircase. The staircase was another job that was completely handed off to a dedicated crew with very little guidance. A couple days later, a finished staircase appeared.

Laying the plywood track took a day and a night, finishing around 9 or 10 a.m. on the Sunday of the East Side Party. The track consisted of three layers of 3/8" plywood bent along the wooden frame. Bending the plywood turned out to not be too hard. The most difficult bit to bend was the start of the first drop. The upturn at the end of the track was another challenge, but that managed to work out nicely as well. We had an awesome crew who worked through the night to finish laying the track.
 |
| Photo credit to Billy DeMaio |
 |
| Photo credit to Danny Ben-David |
 |
| Photo credit to Danny Ben-David (click to zoom for glorious high-resolution) |
 |
| Photo credit to Rachel Davis. Don't worry, the last 4 feet of plywood were added later. |
At this point we hadn't put in the last 4 of plywood track. The cart didn't quite reach it, but I thought it would be good to put in, if only to make people feel safer.
For the first day of operation, the cart faced forwards. We tried flipping it around the next day, and people seemed to prefer going down backwards, so the ride was left backwards for the remainder of the week.
 |
| Photo credit to Danny Ben-David |
Actually running the ride started out pretty inefficient. A crew of 4 or 5 people would slowly walk the cart back to the bottom of the first hill, at which point we winched the cart to the start with an overvolted electric truck winch running off a big A123 battery pack, and cooled by a bank of server fans. The process took about 8-10 minutes per run. Later though, we improved the cart return process to use one strong person to get the cart back to the winch. By the end, the total ride and reset time was under 3 minutes. In total I'd estimate around 400 people were able to ride the roller coaster between Sunday night and Thursday afternoon, when we closed it down.
 |
| Photo credit to Wesley Lau |
Here are a couple videos of rides from Sunday night (courtesy of Rachel Davis):
One big unknown pre-building was how the plywood track would hold up to repeated use. By the time we stopped doing rides, there were a couple small patches of plywood where the top ply had started falling apart. These patches were at the highest compression spots on the track, at the bottoms of the first two hills. So the top layer of plywood is good for a few hundred ride cycles at this loading, but not much more. If we did want to run the roller coaster for longer, however, it would have been easy to replace just the top layer of plywood where it was wearing out.
Well, that's a wrap.











































{kind=link}
{kind=link}