I built 6 furuta pendulums for a university controls class:
Since the original furuta pendulum was all built out of scrap I had lying around, I had to redesign pretty much everything from scratch.
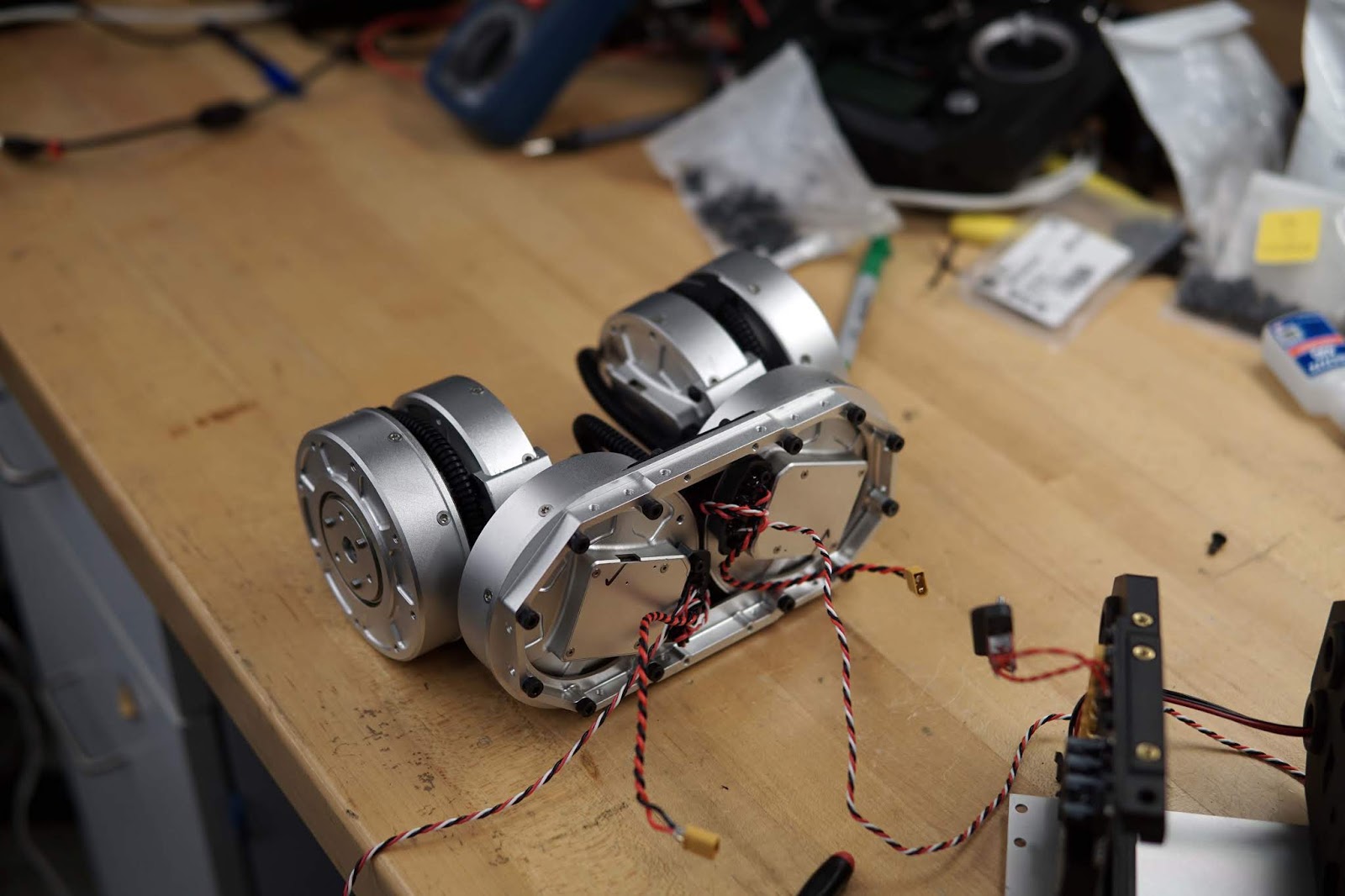
Instead of using a hand-skewed motor like the original, I used a custom-wind of a T-motor gimbal motor. These have low enough cogging torque to work pretty well:
Each motor gets a Microfit connector crimped on the leads, and a hollow shaft retaining-compounded in, for the encoder wheel to attach to:
The spindle has a pair of bearings very lightly preloaded by a wavy washer, and a diametrically magnetized magnet in the back which is read by a hall encoder:
In the base is a US digital 20k count/rev optical encoder which the wires for the pendulum hall encoder pass through:
SPI to the pendulum encoder gets passed over a 12-pin slip ring, with each pin doubled-up for (hopefully) better reliability:
In the base there's a board with power switch, mode switch, DC input jack, USB connector for serial communication, and programming header on it. The mode switch allows the pendulum control to be done by the on-board motor controller, or by taking commands and passing back sensor outputs over serial to a computer running the controller.
I didn't want any screws to show, so the top is held on by 4 magnets:
150 Front actuator housings with output bearing installed:
50 upper legs. The upper link was consolidated from 3 parts to 2 for the new robots:
For assembly I got these fancy Wera adjustable torque screwdrivers, so I (and people helping assemble) could repeatably torque all the screws:
A handful of the 450 planet gears with needle bearings installed:
150 rings gears with OD's post-machined to size. Ready to be pressed into the housings:
A sea of sun gears:
Actuator with stator and gearbox installed:
I made several minor design mistakes I had to fix. Some holes in the sheet metal were 1mm off, so I made this fixture for re-machining the holes. Small mistakes like this sunk a huge amount of time, because each on has to be fixed between 50 and 150 times. Fortunately everything was salvageable.
Most of the actuators with stators and planetary gearboxes installed:
Part of one robot body with computer, CAN interface, IMU, RC receiver, and power supply:
The glorious actuator cabinet:
Computers and CAN breakouts:
Power supplies, body center-plates:
Belts installed, ready for tensioners and outer half of the leg clamshell.
A mostly assembled leg:
A nearly complete robot, waiting for the last few wire-management steps and final body assembly:
One robot during electrical and software testing, before final assembly:
Half a robot's worth of actuators:
Final assembly step of attaching the legs to the body:
Robot with top panel removed:
A pair of robots ready for final testing:
Most of the new robots lined up on the lab treadmill:
I just finished building a bunch of Mini Cheetahs which the lab is loaning out to other research groups. Since we're giving these to people who for the most part aren't hardware oriented, these robots need to be even more robust than the original one.
One piece of that is preventing the motors from burning out. During normal operation with a good locomotion controller, the motors barely even get above ambient (even going 3.7 m/s, the motors weren't warm to the touch afterwards). However, it's really easy to write a controller that rapidly heats up the motors without actually doing anything - railing torque commands back-and-forth due to instability, joints mechanically stuck against something, machine-learning algorithm flailing around wildly, etc. We haven't burned out any motors on the original Mini Cheetah yet, but I think our lab members all have a pretty good sense of what's good/bad for the robot, and know to shut it down quickly if something bad is happening. But when the robot is in the hands of a bunch of software and machine learning engineers..... So to protect the robots, I'm adding in winding temperature sensing and over-temperature protection, to (hopefully) make it impossible to burn out the motors.
Now, the smart way to do this would have probably been to just add a thermistor in the windings, and call it done. Obviously, I didn't do that, so here's my observer-based workaround.
Overview
The temperature estimate uses an observer to combine two sources of information: A thermal model of the motor, and a temperature "measurement" based on the resistance temperature coefficient of the copper in the windings. The resistance of the motor is estimated based on applied voltage, measured current, measured speed and known motor parameters, and compared against the resistance at a known temperature. Sounds pretty simple, right?
Of course not. If it was, it wouldn't be worth a blog post. It's not terribly complicated either, but it took a bunch of little hacks to make it actually work.
Thermal Modeling:
I'm using a 1st order thermal model with just thermal mass \(C_{th}\) and thermal resistance to ambient \(R_{th}\). With temperature rise over ambient \(\Delta T\), thermal power going in \(\dot{Q_{in}}\), and thermal power going out \(\dot{Q_{out}}R_{th} = \Delta T\), the dynamics are
$$
\Delta \dot{T} = \frac{\dot{Q}_{in} - \dot{Q}_{out}}{C_{th}}
$$
To get \(\dot{Q}_{in}\), I just use \(i^{2} R\), but accounting for the variation from nominal resistance\(R_{0}\) due to \(\Delta T\), i.e. it's temperature coefficient of resistance \(\alpha\) (.00393 for copper):
$$
\dot{Q}_{in} = (1 + \alpha\Delta T)R_{0}i^{2}
$$
In (slightly simplified) code, the model part of the observer is updated as follows, by Euler-integrating the thermal model.
An important implementation detail, in the actual firmware I'm doing the last line of math as doubles, rather than floats like everything else. My sample period DT is very small (since my loops run at 20-40 kHz depending on the motor I'm driving), and \( \frac{\dot{Q_{in}} - \dot{Q_{out}}}{C_{th}}\) is also pretty small since the thermal dynamics are very slow. As a result, the change in temperature over one loop-cycle gets rounded down to zero when you use floats. Since STM32F4's are crap-tastic at double math, this single line takes a substantial fraction of my 25 microsecond loop period when I'm running at 40 kHz. I'm sure there's a way to do this avoiding doubles, but I have just enough computational headroom that I don't care.
Measuring Temperature and Resistance
Assuming we can measure the resistance of the motor perfectly and we know nominal resistance \(R_{0}\) at some temperature \(T_{0}\), and the temperature coefficient \(\alpha\) , we can calculate temperature:
$$
T = T_{0} + \left(\frac{R}{R_{0}} -1 \right)\frac{1}{\alpha}
$$
To measure \(R\), use one of the synchronous motor voltage equations. I use the Q-axis one, because for my surface PM robot motors there's usually not much current on the D axis.
We'll assume \( \frac{di_{q}}{dt} \) is zero, since the temperature observer is going to be very low-bandwidth compared to the current control dynamics. Conveniently if you use the Q-axis voltage equation rather than the D-axis one, the \( \omega L_{d}i_{d} \) term is usually zero, since \(i_{d} \) is only non-zero at high-speeds during field weakening, and in that region you can't get enough q-current into the motor to burn it out anyways.
Since we know \(V_{q}\), \(i_{q}\), \(i_{d}\), \(\omega\), \(l_{d}\), and \(\lambda\), we can just solve the voltage equation for \(R\). In reality I had to add a trick to get this to work, but I'll get into that later.
Implementing the Observer
The basic steps in the observer are:
Integrate forward the dynamics of the quantity you are estimating
Take a sensor reading and calculate the error between the estimate and the sensor reading
Use a proportional controller to drive the estimate towards the sensor reading
In code the whole observer looks like this:
// Integrate the thermal model //delta_t=observer.temperature-T_AMBIENT;observer.qd_in=R_NOMINAL**(1.0f+.00393f*delta_t)*controller.i*controller.i;observer.qd_out=delta_t*R_TH;observer.temperature+=DT*(observer.qd_in-observer.qd_out)/C_TH;// Estimate Resistance //observer.resistance=(controller.v_q- controller.omega*(L_D*controller.i_d+WB))/(controller.i_q);// Estimate Temperature from temp-co //observer.t_measured=((T_AMBIENT+((observer.resistance/R_NOMINAL)-1.0f)*254.5f));// Update Observer with measured temperature //e=(float)observer.temperature-observer.temp_measured;observer.temperature-=.0001f*e;
Naively implemented, the above didn't really work - the resistance measurements are terrible , so either you have a very low observer gain and basically run open-loop with just the thermal model, or the temperature estimate varies wildly depending on the speed and torque the motor is operating at. It took a couple more additions to get it to work reliably.
Voltage Linearization
The first problem I notice was that the measured resistance changed dramatically as the current varied. At low currents, the estimated resistance was much higher. This problem was caused by nonlinearity in the voltage output of the motor drive due to deadtime. I tried a few methods for compensating the dead time, but I got the best result by scaling my d and q axis voltages based on modulation depth. I measured the nonlinearity by logging measured current vs commanded modulation depth over a range of currents, putting all the current on the d-axis so the rotor didn't move.
I generated a lookup table to scale the commanded voltages so that current vs commanded voltage is linear. Around zero commanded voltage, I actually only get about .5 output volts per commanded volt, pre-linearization:
State-dependent Gain Scaling
i.e. lazy person's Kalman filter substitute.
Even with the voltage linearization, there are some operating conditions which make it hard to measure the resistance accurately.
At very low currents the measurements are bad. You have a small voltage divided by a small current, so the result is super sensitive to noise or bias in either.
At high speeds the measurements are also bad since the flux linkage term in the voltage equation dominates. Slight error in the flux linkage constant causes errors, and also non-sinusoidal flux linkage and inductances mean there's lots of ripple in the d and q voltages and currents at high speed.
The least sketchy way to incorporate these effects might be to figure out how the covariance of the temperature "measurement" depends on the operating state, and use a Kalman filter to optimize the observer gain based on the changing covariance.
My sketchy alternative was to hand-tune a "trust" function which behaves similarly to inverse covariance, to make the gain really small in states where I don't trust the temperature measurement. Basically, if the current is below some threshold, make the gain really small, and/or if the speed is above some threshold, make the gain really small. Around each threshold I have a linear ramp, to smooth things out a bit. In code, my "trust" function works like this:
// Calculate "trust" based on state //observer.trust=(1.0f-.004f*fminf(abs(controller.dtheta_elec),250.0f))*(.01f*(fminf(controller.current^2,100.0f)));// Scale observer gain by "trust" //// .0001 is the default observer gain //observer.temperature-=observer.trust*.0001f*e;
When the resistance estimates are the best (current greater than 10 amps, speed near zero), "trust" is equal to 1, so the observer gain doesn't change, and the observer gain goes to zero (i.e. open-loop) at really bad measurement points. I'm sure this would horrify every controls professor I've had, but it works pretty well:
Here's a video of testing with one of the mini cheetah motors, with a thermocouple glued into the windings. I'm railing the current command between -40A and 40A at 5 hz, so the motor only spends a very brief period of time at low speed, and most of its time at high speed with low current. In this test I initialize the motor temperature at 25 degrees, even though the motor is still at 60 degrees from a previous experiment. The observer takes about 16 seconds to converge to the actual temperature, but from there on it tracks to within ~5 degrees. Once the temperature hits 120 degrees, the current limit is throttled back to 14 amps in order to keep the temperature below 120 C:
I was just at ICRA 2019 with the robot, to present a paper and demo the robot:
Not my picture. Pulled from google images.
Here are a few other peoples' videos from the conference and the legged robot workshop. Despite being half the size of all the other robots, Mini Cheetah was running circles around them.
Now that this is officially out I can finally put up something about what I've been doing for the past 2 years.
Photo Credit: Bayley Wang
This project has been a continuation of the Hobbyking Cheetah project, but for research rather than out of my pocket. Here's my thesis on the actuator and robot design. I designed and built all the all the hardware, both mechanical and electronics (with some design and fabrication help from Alex), and Jared wrote pretty much all the software and high-level control running the robot, including the Convex Model Predictive Control for locomotion.
The design principles behind the robot are very similar to Cheetah 3: High torque electric density motors, low gear ratio, efficient transmissions to minimize friction and reflected inertia, lightweight legs with motors placed to minimize leg inertia. A few things are different, though. Mini Cheetah has 12 identical modular actuators with built-in motor control, gearbox, and support structure. The electric motors are off-the-shelf and very cheap, unlike Cheetah 3's custom designed motors. Mini Cheetah has even more range of motion than Cheetah 3 at the hip, so it's able to point it's legs completely sideways. This means that it should be possible to make the robot land feet-first regardless of what orientation it falls in.
I finished the hardware for the robot last May, but the publication cycle is kind of slow, so I wasn't able to put up any info about it before. There's going to be a paper about the robot in ICRA 2019 in Montreal, so the robot and I will both be there.
-------------
Jared and I (mostly Jared) did the backflips for our final project for Underactuated Robotics last spring. There are some more details about how it works in the thesis, but basically we did a nonlinear trajectory optimization offline, and just played back the resulting joint torques on the motors, with a little bit of joint position control to the optimized trajectory on top. Our simulation of the dynamics was accurate enough that it worked on the first try in the hardware.
Here are the videos from back in May. At the time we weren't set up for backflips completely untethered and wireless. Since then we've adjusted the flip trajectory a bit, made the landing less bouncy and more reliable, and gone fully wireless.
The torque sensor got new electronics Bayley designed, which have a built in power supply, A/D, and micro, to convert the signal to digital as quickly as possible. I made a nice box to house all the electronics:
The torque sensor mounted, with the absorber on the right and the motor under test on the left:
To power and control the test motor, there's a bank of terminals for DC input and motor phase output, if you want to drive the test motor with the Prius inverter built into the dyno. And quick disconnect fittings for water cooling the test motor:
Speaking of inverters, here's a look under the sheet metal covers: Underneath are two Prius "bricks" mounted to a big waterblock. Although the Prius power modules have two 3-phase inverters each, we had to use two of them so we could separate out the DC link current measurement for the inverter powering the test motor.
The dyno has an internal Mac Mini with linux on it, runing a fork of my dyno software. Thanks to the cross-platform-ness of Python and Qt, all I had to do was install all the libraries and change the "COM" serial ports to "/dev/ttyUSB" and it just worked. Yes, that's the "Hybrid Synergy Drive" plaque from the Prius power module covering up the Apple logo:
To go with the computer, it has a built-in monitor which can be raised and lowered for storage:
The absorber and all the sensors work, and we've helped the FSAE team do a little bit of testing on their new motors. Next up is populating the second half of the control electronics so the dyno can control the test motor. Then we'll be able to do a full optimization of the Sonata HSG and get even more power out of the big kart.